直线运动¶
约 3519 个字 1 张图片 预计阅读时间 12 分钟
称物体运动时通过的路径为该物体的运动轨迹。
若物体的运动轨迹是一条直线,则称该物体做直线运动。
按物体受力的不同,直线运动又可以进一步划分为:
- 匀速直线运动
- 匀变速直线运动(包括匀加速或匀减速直线运动)
- 变速直线运动
基本概念¶
下面是直线运动过程中的一些基本概念
-
\(\overrightarrow{v}\) :速度,常见单位 \(m/s\) ,速度描述了物体运动快慢与方向,属于矢量,可以分为瞬时速度 \(\overrightarrow{v_{瞬}}\) 与平均速度 \(\overline{\overrightarrow{v}}\) 。
-
\(v\) :速率,常见单位 \(m/s\),速率仅描述了物体运动的快慢(可视为速度的模即 \(|\overrightarrow{v}|\) ),属于标量,区别于速度的方向性,同样可以分为瞬时速率\(v_{瞬}\) 与平均速率 \(\overline{v}\) 。
-
\(\overrightarrow{x}\) :位移,常见单位 \(m\) ,位移是从初位置指向末位置的有向线段,属于矢量。
-
\(s\) :路程,常见单位 \(m\) ,路程描述了物体的运动轨迹的长度,属于标量,区别于位移。
-
\(\overrightarrow{a}\) :加速度,常见单位 \(m/s^{2}\) ,加速度描述了物体运动速度变化的快慢与方向,属于向量.
-
\(t\) :时间,常见单位 \(s\),属于标量,通常认为 \(0 \le t\) 。
根据两点之间线段最短,必然有\(|\overrightarrow{x}| \le s\) 。
对于任意运动,都有 \(\overline{v}t = x_{t}\) 。
基础公式¶
下面是物体在不同运动状态下,各物理量的定量关系计算方法
匀速直线运动¶
物体做匀速直线运动时,速度 \(v\) 为定值,加速度 \(a\) 为 \(0\) ,物体所受的合外力为 \(0\) 。
其中 \(x \propto t\) ,比例系数为 \(v\) ,即:
由于匀速直线运动在初中阶段已经学习过,此处不过多介绍。
匀变速直线运动¶
Tip
在描述随时间而变化的物理量时,常用下标时刻的方式来表示该时刻下的物理量。
如 \(v_{t}\) 可表示时刻 \(t\) 下的速度。
在无需区分向量与标量时(例如仅做数值运算时),为书写方便也可不标向量上方的箭头,但这种写法并不标准,需读者注意。
同时,下文中默认初位移 \(x_0\) 为0。
物体做匀变速直线运动时,速度 \(v\) 随时间的变化而变化,加速度 \(a\) 为定值,物体所受的合外力为定值。
其中 \(v \propto t\) ,比例系数为 \(a\) ,即:
\(t\) 时刻的速度 \(v_{t}\) 可表示为:
位移 \(\overrightarrow{x}\) 等于速度矢量对时间的定积分。具体来说,从时刻 \(t_{1}\) 到时刻 \(t_{2}\) 间的位移 \(\overrightarrow{x}\) 为:
即位移等于v-t图像下的面积,套用梯形面积公式可以得到:
又根据 \(\overline{v}t = x_{t}\),所以:
将 \(v_{t} = v_{0} + at\) 代入可以得到:
由 \(\Delta v = v_t - v_0 = at\) 得 \(t = \frac{v_t - v_0}{a}\) ,代入得:
整理即得:
综上,整理一下匀变速直线运动的公式:
在解题时,可观察题面中给出以及需求解的物理量来选取对应的公式。
变速直线运动¶
变速直线运动的加速度 \(a\) 随时间的变化而变化,即物体所受的合外力随时间的变化而变化。
在变速直线运动当中,一段时间内的速度变化量 \(\Delta \overrightarrow{v}\) 等于这一段时间内加速度矢量对时间的定积分。
具体来说,从时刻 \(t_{1}\) 到时刻 \(t_{2}\) 的速度变化量 \(\Delta \overrightarrow{v}\) 为:
即速度变化量 \(\Delta \overrightarrow{v}\) 等于a-t图像下的面积。
当 \(a \propto t\) 即 \(a_t = a_0 + k \cdot t\) 时,a-t图像为直线,套用梯形面积公式可以得到:
图像分析¶
x-t图像¶
在 \(x-t\) 图像中,曲线的切线斜率即为瞬时速度 \(v\):
若 \(x\) 满足 \(x=mt^{2}+nt+x_{0}\),则
这正对应前文给出的 \(x^{\prime}=2mt+n\),即匀加速运动的速度表达式。
在x-t图像中:
- 其在某一点切线的斜率给出了该时刻的速度 \(v\) ,即对于x-t图像求导。
- 其面积通常情况下没有含义,其面积的量纲为 \(m\cdot s\) 。
- 其纵截距代表初位移 \(x_0\) ,在通常情况下为0。
- 其横截距代表开始运动的时刻(常记为 \(t_0\) ),在通常情况下为0。
根据其图像符合的解析式,又可以进一步分为3种较为常见的模型。
\(x = C\)¶
此处\(C\)代表常量 const 。
此时 \(x\) 不随 \(t\) 的变化而变化,即物体处于静止状态。
\(x = k\cdot t\)¶
根据x-t图像斜率所代表的意义可知,有 \(k=v\) 。
此时 \(x \propto t\) ,即物体做匀速直线运动。
\(x = mt^2 + nt + x_{0}\)¶
根据公式 \(x = v_{0}t + \frac{1}{2} at^{2}\) ,使用待定系数法可以得到:
对于 \(x = mt^2 + nt + x_{0}\) 求导又可以得到:
即物体做匀加速运动。
v-t 图像¶
在 \(v-t\) 图像中,曲线的切线斜率即为瞬时加速度 \(a\):
若 \(v(t)\) 为二次多项式 \(v=mt^{2}+nt+v_{0}\),则
这与前文给出的 \(a=v^{\prime}=2mt+n\) 完全一致,描述了加速度随时间的线性变化(\(a\propto t\))。
在v-t图像中:
- 其在某一点切线的斜率给出了该时刻的加速度 \(a\) ,即对于v-t图像求导。
- 其面积代表位移 \(x\) ,即对于v-t图像积分。
- 其纵截距代表初速度 \(v_0\) 。
- 其横截距代表速度 \(v\) 为 \(0\) 的时刻(常记为 \(t_0\) )。
根据其图像符合的解析式,又可以进一步分为3种较为常见的模型
\(v = C\)¶
此处\(C\)代表常量 const 。
此时 \(v\) 不随 \(t\) 的变化而变化,即物体处于匀速直线运动状态。
\(v = k\cdot t\)¶
根据v-t图像斜率所代表的意义可知,有 \(k=a\) 。
此时 \(v \propto t\) ,即物体做匀变速直线运动。
\(v = mt^2 + nt + v_{0}\)¶
对于 \(v = mt^2 + nt + v_{0}\) 求导可以得到:
不难发现 \(a \propto t\) ,即物体做加速度均匀变化的变速直线运动。
a-t 图像¶
在a-t图像中:
- 其在某一点切线的斜率给出了该时刻加速度变化速率(即“jerk/急动度”)\(j\): ,即对于a-t图像求导。
- 其面积代表位移变化量 \(\Delta v\) ,即对于a-t图像积分。
- 其纵截距代表初加速度 \(a_0\) 。
- 其横截距代表加速度 \(a\) 为 \(0\) 的时刻(常记为 \(t_0\) )。
根据其图像符合的解析式,又可以进一步分为2种较为常见的模型:
\(a = C\)¶
此处\(C\)代表常量 const 。
此时 \(a\) 不随 \(t\) 的变化而变化,即物体处于匀变速直线运动状态。
\(a = k\cdot t\)¶
根据v-t图像斜率所代表的意义可知, \(k\) 为加速度变化率。
即物体做加速度均匀变化的变速直线运动。
\(v^2 - x\) 图像¶
Warning
需要注意,\(v^2\) 与 \(x\) 之间 不一定满足函数关系 。
函数关系要求:对于每个位置 \(x\),必须有 唯一确定 的 \(v^2\) 值与之对应。
-
当运动满足 \(|v|\) 是 \(x\) 的单值函数时 , \(v^2\) 与 \(x\) 才成函数关系。例如在 匀加速直线运动 (且不折返)中,公式 \(v^2 = {v_0}^2 + 2a(x - x_0)\) 给出了 \(v^2\) 与 \(x\) 之间的一一对应。
-
当物体在同一位置可以对应多个不同的速率 \(|v|\) 时 , \(v^2\) 与 \(x\) 就不构成函数关系。
典型例子是 往复运动 (如弹簧振子):物体两次经过同一位置时,速率可能不同,此时一个 \(x\) 对应多个 \(v^2\) 值,违反函数的定义。
因此,判断的关键在于 运动过程中是否出现同一位置对应多个速率的情况 ,而不仅仅是速度方向是否改变(若方向改变但速率唯一,仍可为函数关系)。
在 \(v^2 - x\) 图像中:
- 其在某一点切线的斜率给出了该时刻加速度的二倍 \(2a\) ,即对于a-t图像求导。
- 其面积通常情况下是没有含义的,其面积的量纲为 \(m^3/s^2\) 。
- 其纵截距代表位移为0时速度的平方(若初位移为0则等价于初速度的平方) \({v_0}^2\) 。
- 其横截距代表速度 \(v\) 为 \(0\) 时的位移(常记为 \(x_0\) )。
根据其图像符合的解析式,又可以进一步分为2种较为常见的模型:
\(v^{2} = C\)¶
此处\(C\)代表常量 const 。
此时 \(v\) 不随 \(t\) 的变化而变化,即物体处于匀速直线运动状态。
\(v = kx+b\)¶
根据\(v^2 - x\) 图像斜率所代表的含义可知,\(k = 2a\) (若初位移 \(x_0 = 0\) 还有 \(b = {v_0}^2\) )
\(\frac{x}{t} - t\) 图像¶
该图像描绘的是平均速度 \(\overline{v}=\frac{x}{t}\) 随时间的变化。
- 其在某一点切线的斜率给出了该时刻平均速度变化率 \(a_{平}\) ,即对于 \(\frac{x}{t} - t\) 图像求导。
- 其面积代表该时刻的位移 \(x\) 。
- 其纵截距代表开始运动时的平均速度 \(\overline{v}_0\)。
- 其横截距代表平均速度等于0的时刻。
微分分析
由于\(\frac{x}{t} - t\) 图像在某一点切线的斜率所代表的含义并不常见,相关物理量之间的数量关系可能无法快速想到,在此给出部分数量关系推导过程:
借助微元法/微分思想,对于一个极小的位移 \(\Delta x\) ,可以近似将这段运动看做匀变速运动,其平均速度变化率 \(a_{平}\) 与加速度 \(a\) 存在一定关系,具体推导过程如下:
根据 \(x = v_{0}t + \frac{1}{2} at^2\) ,可得:
$$
\begin{aligned} \overline{v} &= \frac{x}{t} \ &= \frac{v_{0}t + \frac{1}{2} at^2}{t} \ &= v_{0} + \frac{1}{2} at \end{aligned} $$
不难发现 \(\overline{v} = \frac{x}{t} \propto t\) ,进一步,有斜率 \(a_{平} = \frac{1}{2}a\) 。
综上,在某一点切线的斜率必然等于该时刻物体加速度的二分之一。
根据该图像符合的解析式,又可以进一步分为2种较为常见的模型:
\(\overline{v} = \frac{x}{t} = C\)¶
此处\(C\)代表常量 const 。
此时 \(\overline{v} = \frac{x}{t}\) 不随 \(t\) 的变化而变化,即物体处于匀速直线运动状态。
\(\overline{v} = \frac{x}{t} = kt + b\)¶
根据上文微分分析可知 \(\overline{v} = \frac{x}{t} = v_{0} + \frac{1}{2} at\) 。
此时 \(k\) 为定值,即加速度 \(a\)为定制,故物体做匀变速运动。
图像分析概要¶
-
确定研究对象。
-
确定自变量、因变量、横纵轴所代表的物理量。
-
列出正常条件下横纵轴物理量间存在的定量关系公式。
-
找图像斜率、面积、截距的意义。
常见模型¶
在这里,笔者列举数种较为常见的考题
模型,从这数个模型展开拓展延伸,可以覆盖大多数题目。
追及与相遇¶
追及与相遇这两者本质相同,故在此一并进行解析。
例题-又是一年军训¶
题面¶
在学校组织的军训展示环节中,某班级排成一条长度为 \(L\) 的队列(从队尾到队首的距离为 \(L\)),最初全体同学保持静止。
队列在老师的口令下,以恒定加速度 \(a_{team}\) 做匀加速运动,直至达到最大速度 \(v_{\max}\),随后保持该匀速。
作为通讯兵的小明最开始在队尾等待信号。信号在 \(t_0\) 后才传到他手中,此时队列仍在加速阶段。
小明收到信号后立即向队首奔去,追上队首后,此时队列恰好开始以 \(v_{\max}\) 的速度前行,小明保持同样的速度与队伍一同前行,小明需要花 \(\Delta t\) 与队长交接信息。
小明在队首与队长交接信息完成后立即掉头返回队尾。返回阶段以加速度 \(a_{stu}^{\prime}\) 向后加速(初始速度为 \(0\)),直至追上队尾。设小明于\(t_4\)返回队首。
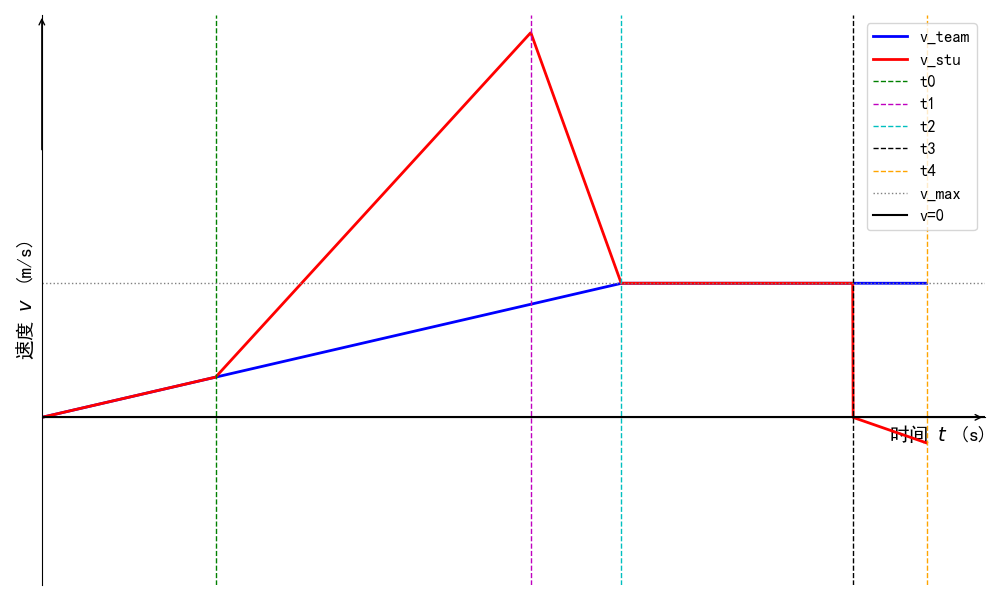
具体来说,小明的运动过程如下:
- \(0 \le t < t_0\) 时,小明从静止开始做匀加速运动,加速度为 \(a_{team}>0\)。
- \(t_0\le t < t_1\) 时,小明从原速度开始做匀加速运动,加速度为 \(a_{stu}>0\)。
- \(t_1\le t < t_2\) 时,小明从原速度开始做匀减速运动,加速度为 \(a_{stu}^{\prime}<0\)。
- \(t_2\le t < t_3,(t_3 = t_2+\Delta t)\) 时,小明以速度 \(v_{\max}\) 做匀速运动。
- \(t_3\le t < t_4\) 时,小明从静止开始做匀加速运动(反向),加速度为\(a_{stu}^{\prime} < 0\)。
你需要使用 \(a_{team}, t_0, a_{stu}^{\prime}, v_{\max}, a_{stu}, \Delta t\) 表示下述内容
- 小明在第 1 段与第 2 段运动的分界时刻 \(t_1\)(\(t_0<t_1<t_2\))以及第 2 段结束时刻 \(t_2\)。
- 队列的长度 \(L\)。
- 小明完成一次往返(从队尾到队首再返回队尾)所需的总时间 \(t_4\)。
解析¶
本题固然可以通过求图像中面积的方式求解,但并不方便,不妨让我们考虑使用解析几何来解决这个问题。
具体来说,我们可以使用分段函数来表示队伍和小明的速度变化。
由题可知,队伍的函数如下:
接下来我们分段考虑小明的运动情况:
$0\le t < t_0 $ 时,小明与队列一同行进,其速度也与队列相同:
$ t_0 \le t < t_1 \(时,小明加速向前,对于这一段函数,我们知道其斜率\)a_{stu}$ 以及其\(t_0\)时的坐标 \((t_0,t_0\cdot a_{team})\),即可得到函数解析式,过程如下:
令 \(t = t_0, \quad v = t_0 \cdot a_{team}\),解得:
$ t_1 \le t < t_2 \(时,小明减速追上队首,我们同样知道这段函数的斜率 \(a_{stu}^{\prime}\) 以及其 \(t_1\) 时的坐标 \((t_1,t_1\cdot a_{stu} + t_0 \cdot (a_{team}-a_{stu}))\) ,为了求出这段函数的解析式,我们需要先求出\)t_2$。
根据题意,小明在\(t_2\)时刻追上队首,此时队列开始以\(v_{\max}\)匀速行进,因此\(t_2\)就是队列达到最大速度的时刻:
现在我们可以求出\(t_1\)。在\(t_1\)时刻,小明追上队首,此时小明和队首的位置相同。我们需要通过位移关系来求解\(t_1\)。
首先,我们计算队首在\(t_0\)到\(t_2\)期间的位移。队首的运动分为两段: 1. \(0 \le t < t_0\):从静止开始以加速度\(a_{team}\)加速 2. \(t_0 \le t < t_2\):继续以加速度\(a_{team}\)加速直到达到\(v_{\max}\)
队首在\(t_0\)时刻的速度为\(v_{team}(t_0) = t_0 \cdot a_{team}\),在\(t_2\)时刻的速度为\(v_{\max}\)。
队首在\(t_0\)到\(t_2\)期间的位移为:
小明在\(t_0\)到\(t_1\)期间的位移为:
小明在\(t_1\)到\(t_2\)期间的位移为: \(\(x_{stu2} = v_{stu}(t_1) \cdot (t_2 - t_1) + \frac{1}{2} a_{stu}^{\prime} \cdot (t_2 - t_1)^2\)\)
其中\(v_{stu}(t_1) = t_1 \cdot a_{stu} + t_0 \cdot (a_{team} - a_{stu})\)
现在我们来求解\(t_1\)。在\(t_1\)时刻,小明追上队首,意味着小明的总位移等于队首的位移加上队列的初始长度\(L\):
其中: - \(x_{stu1}\)是小明在\(t_0\)到\(t_1\)期间的位移 - \(x_{stu2}\)是小明在\(t_1\)到\(t_2\)期间的位移 - \(x_{team}\)是队首在\(t_0\)到\(t_2\)期间的位移
将前面的公式代入,我们得到:
整理得到:
将\(t_2 = \frac{v_{\max}}{a_{team}}\)代入,并解出\(t_1\):
$t_2 \le t < t_3 $ 时,此时小明与队伍同时保持\(v_{\max}\)行进,则:
$t_3 \le t < t_4 $ 时,小明加速返回队尾,此时小明的初始速度为\(0\)(相对于队伍),加速度为\(a_{stu}^{\prime}\):
现在我们需要求解队列长度\(L\)和总时间\(t_4\)。
对于队列长度\(L\),根据前面的位移关系方程,我们可以解出\(L\):
这个表达式可以进一步简化。将\(t_2 = \frac{v_{\max}}{a_{team}}\)代入,我们得到:
整理得到: \(\(L = \frac{1}{2} a_{stu} \cdot (t_1 - t_0)^2 + (t_1 \cdot a_{stu} + t_0 \cdot (a_{team} - a_{stu})) \cdot (\frac{v_{\max}}{a_{team}} - t_1) + \frac{1}{2} a_{stu}^{\prime} \cdot (\frac{v_{\max}}{a_{team}} - t_1)^2 - \frac{v_{\max}^2}{2a_{team}}\)\)
接下来我们求解小明完成一次往返所需的总时间\(t_4\)。
在\(t_3\)时刻,小明开始返回队尾。此时小明相对于队伍的速度为\(0\),然后以加速度\(a_{stu}^{\prime}\)向后加速。
小明返回时的速度函数为:
小明返回时的位移函数为(以\(t_3\)时刻的位置为起点):
在\(t_3\)到\(t_4\)期间,队尾继续向前运动。队尾的速度函数需要分段考虑:
-
在\(0 \le t < t_2\)期间,队尾以加速度\(a_{team}\)加速,速度函数为: \(v_{team}^{(tail)} = t \cdot a_{team}, \quad 0 \le t < t_2\)
-
在\(t_2 \le t\)期间,队尾以速度\(v_{\max}\)匀速运动: \(v_{team}^{(tail)} = v_{\max}, \quad t_2 \le t\)
因此,在\(t_3 \le t < t_4\)期间,队尾的位移函数为(以\(t_3\)时刻的位置为起点):
当小明返回队尾时,他的位移等于队尾的位移加上队列长度\(L\):
即:
整理得到:
这是一个关于\((t_4 - t_3)\)的二次方程,可以求解出\(t_4 - t_3\),进而得到\(t_4\)。
使用二次方程求根公式:
由于\(a_{stu}^{\prime} < 0\)且\(a_{team} > 0\),所以\(a_{stu}^{\prime} - a_{team} < 0\)。为了使\(t_4 - t_3 > 0\),我们需要选择合适的根:
因此,总时间\(t_4\)为:
其中\(t_3 = t_2 + \Delta t = \frac{v_{\max}}{a_{team}} + \Delta t\)。
至此,我们已经完成了题目要求的所有求解: 1. 分界时刻\(t_1\)和结束时刻\(t_2\) 2. 队列长度\(L\) 3. 总时间\(t_4\)